Het Zwitserse bedrijf ORCA Dexterity introduceert in maart 2026 drie nieuwe open-source robot handen voor robotica manipulatie onderzoek. De modellen richten zich op onderwijs, laboratoria en geavanceerde AI-gestuurde robottoepassingen.
Met deze release zet ORCA Dexterity een duidelijke stap richting toegankelijke en modulaire robotica. Onderzoekers kunnen de hardware en software vrij gebruiken, aanpassen en uitbreiden. Dit versnelt innovatie in een veld waar precisie en tastzin steeds belangrijker worden.
Drie modellen met oplopende complexiteit
ORCA Dexterity presenteert drie varianten, elk met een eigen doelgroep en toepassing:
1. OrcaHand Lite (9 DoF)
Dit instapmodel heeft negen vrijheidsgraden, ook wel degrees of freedom genoemd. Dit betekent dat de hand negen onafhankelijke bewegingsrichtingen heeft.
- Compact en lichtgewicht ontwerp
- Lage kosten, geschikt voor onderwijs
- Ideaal voor multi-robot opstellingen
Deze variant maakt het mogelijk om robotica-experimenten op grotere schaal uit te voeren zonder hoge kosten.
2. OrcaHand (17 DoF)
Het standaardmodel biedt zeventien vrijheidsgraden en volledige onafhankelijke gewrichtscontrole.
- Realistische menselijke handbewegingen
- Actieve koeling voor langdurig gebruik
- Geschikt voor intensief AI-onderzoek
Dit model vormt de kern voor experimenten met complexe manipulatie, zoals objectgrip en fijne motoriek.
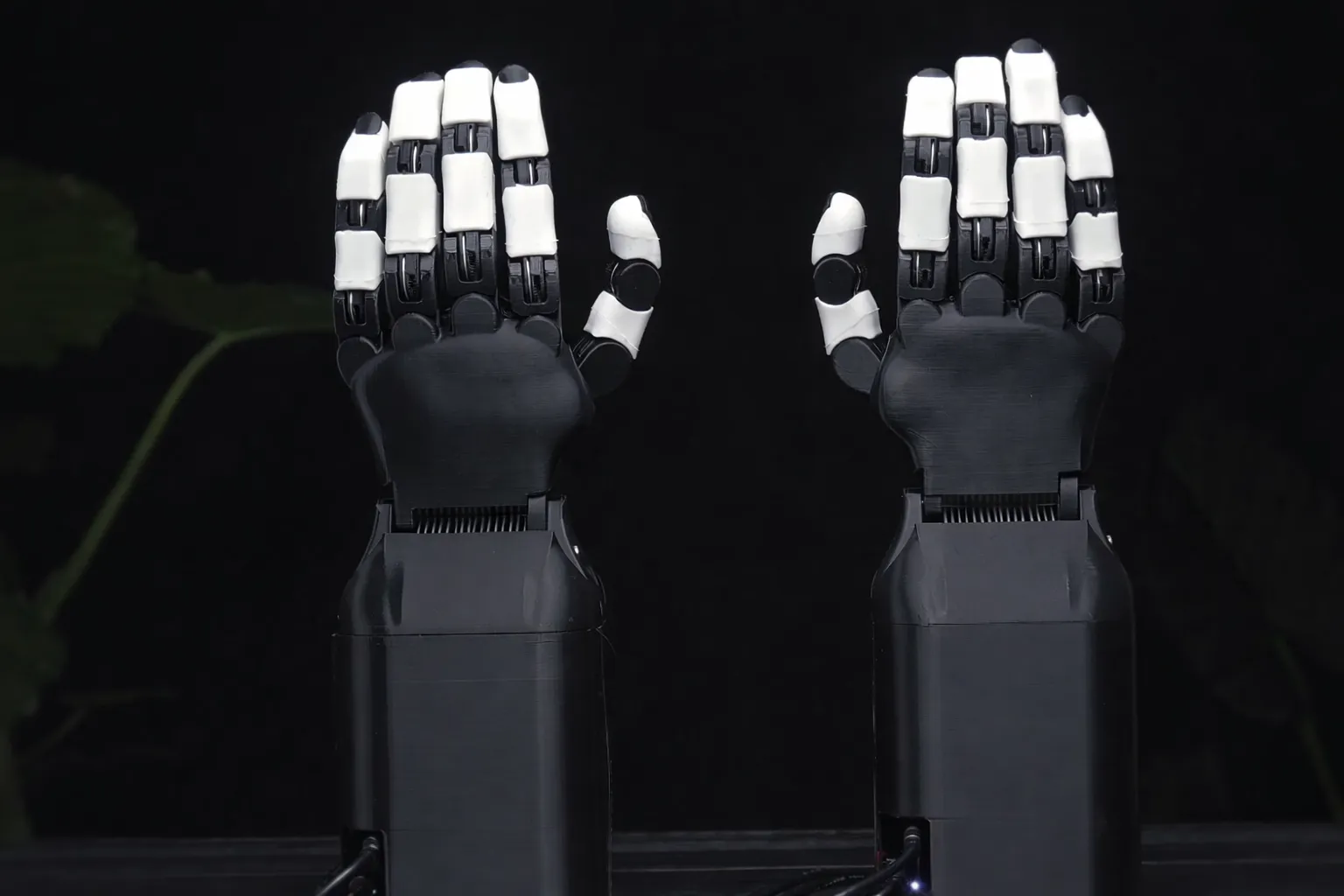
3. OrcaHand Touch (met tactiele sensing)
De meest geavanceerde versie voegt uitgebreide tastzin toe via 351 sensoren, ook wel taxels genoemd.
- 3D krachtmeting over alle vijf vingers
- Geschikt voor contactrijke manipulatie
- Cruciaal voor toepassingen zoals robotgrijpen en interactie
Met deze technologie kan een robot niet alleen bewegen, maar ook voelen hoe hard hij een object vastpakt.
Open-source robotica versnelt innovatie
De keuze voor een open-source aanpak is strategisch. In plaats van gesloten systemen biedt ORCA Dexterity volledige toegang tot ontwerpbestanden en software.
Dit heeft meerdere voordelen:
- Onderzoekers kunnen sneller experimenteren
- Universiteiten besparen kosten
- Innovaties worden sneller gedeeld en verbeterd
Open-source robotica groeit snel binnen AI-onderzoek. Vooral bij manipulatie, waar robots leren omgaan met fysieke objecten, is samenwerking cruciaal.
AI en robot handen: cruciale combinatie
Robot handen spelen een sleutelrol in de ontwikkeling van fysieke AI-systemen. Waar taalmodellen zich richten op tekst, gaat het hier om interactie met de echte wereld.
Belangrijke toepassingen zijn:
- Industriële automatisering
- Zorgrobots
- Logistiek en magazijnbeheer
- Huishoudelijke assistentie
Vooral tactiele feedback, zoals in de OrcaHand Touch, geldt als een doorbraak. Robots kunnen hierdoor leren hoe ze objecten veilig en efficiënt manipuleren.
Focus op schaalbaarheid en onderzoekstoepassing
ORCA Dexterity positioneert de robot handen nadrukkelijk als onderzoeksplatform. De systemen zijn modulair opgebouwd en geschikt voor integratie met bestaande AI-frameworks.
Door de combinatie van:
- Hoge precisie
- Open architectuur
- Sensorische feedback
ontstaat een flexibel ecosysteem voor experimenten met robot learning en reinforcement learning. Dit zijn technieken waarbij AI leert door trial-and-error interactie met de omgeving.
Lees ook

Conclusie: stap richting mensachtige robotmanipulatie
Met deze drie open-source robot handen levert ORCA Dexterity een belangrijke bijdrage aan de ontwikkeling van geavanceerde robotica. Vooral de combinatie van toegankelijkheid en tactiele sensing maakt deze release relevant voor de volgende generatie AI-systemen.
De technologie brengt robots dichter bij menselijke motoriek. Dat is essentieel voor toepassingen waarin precisie, gevoel en adaptief gedrag samenkomen.
Populair nieuws

Google brengt Home Speaker naar Nederland: AI-assistent verhuist van smartphone naar woonkamer

OpenAI verbrandt opnieuw miljarden: waarom investeerders toch blijven geloven in AI

Microsoft en Amazon krijgen mogelijk strenge EU-regels: grote gevolgen voor AI en cloudmarkt

Wat is GPT-NL? Alles wat je moet weten over het Nederlandse AI-model

OpenAI haalt toptalent weg bij Google en verscherpt de AI-strijd

Wat is het Nederlandse Axelera? Innovatie in chips en hardware voor AI
Laatste reacties
- Dit artikel is van 1 april, dus deze belasting is niet echt. Gelukkig maar. :)
 RobinHeester12-05-2026
RobinHeester12-05-2026 - Of een ander land..dat lijkt mij beterHan10-05-2026
- Op 1 april 2028 komt er een AI die al het kantoorwerk van alle Nederlanders overneemt. Heb ik van horen zeggen.RobinHeester01-04-2026
- AI moet een tool zijn. Maar net als Excel, je e-mailbox of Photoshop: die tool kan steeds meer voor je doen als je het de juiste input geeft. Dat ligt bij dokters en andere soortgelijke zaken wel wat gevoeliger. ;)RobinHeester01-04-2026
- Er komt ook extra inkomsten belasting op mensen die met ai hun geld verdienen. De maarregel gaat in op 1 aprill 2027. Er is nog een jaar om een andere baan te vinden.max01-04-2026
- Als ik dit lees moet ik terugdenken aan de tijd, dat ik als IT specialist, dat woord bestond toen nog niet, een programma schreef om de de maagontlediging te meten met een gamma camera.de patient eet een radioactieve pannekoek en eet die op. Je zet de patiënt voor een gammacamera die de verplaatsing van de radioactieviteit in de patient meet. Daar rolt een cijfer uit. De arts die naast mij zat om de uitkomst van de meeting te evalueren zat naast met en zei. Dat is mooi de computer heeft het berekend en die maakt géén fouten. Ik ben bang dat de jonge artsen van nu op AI gaan vertrouwen want die begrijpen niets van hoe AI tot de diagnose komt. Hun ervaring met AI en de patiënten is beide heel miniium. Voordat je met AI gaat werken moet je helaas goed beseffen dat AI fouten maakt, maar vaak zo praat of schrijft dat het een waarheid als een koe is. Een eenvoudige systeem prompt "Als je het niet weet zeg dan gewoon: ik weet het niet niet." Bracht een ai systeem zodanig in de war dat er geen antwoord meer kwam. Het systeem moest van zichzelf altijd antwoord geven. Jonge medicie moeten zich er terdege van bewust zijn dat je boven de stof moet staan en dan pas AI als ondersteuning mag gebruiken bij de diagnose voor echte mensen.max31-03-2026
- Heel veel modems doen dat als voorbeeld het ASUS TUF Gaming AX6000 modem dat staat gewoon in de voorwaarden. Wel kun je dat vermijden met Open-wrt te draaien.max13-03-2026
- fascinerend hoe juist bij Martin (die tegen AI in de rechtszaal staat) de verdenking opduikt.. dat ondermijnt vertrouwen op twee fronten.ai_arjanb11-11-2025
- Waarom geen “safety-by-default” met opt-in voor losser gedrag, plus crisis-detectie en directe verwijzing naar hulpdiensten?martijn_aiz30-10-2025
- voor mij werkt AI het best als snelle “co-pilot” voor analyse, maar de eindbeslissing hoort bij mensen.neuraalnicoy30-10-2025
Loading